这是 DeepMind Scaling Book 系列的第 5 部分。
如何并行化训练 Transformer (How to Parallelize a Transformer for Training)
How To Scale Your Model Part 5 (Part 4: Transformer Math | Part 6: Training LLaMA)
在这里,我们讨论 LLM 训练中使用的四种主要并行方案:数据并行 (data parallelism)、完全分片数据并行 (fully-sharded data parallelism, FSDP)、张量并行 (tensor parallelism) 和流水线并行 (pipeline parallelism)。对于每一种,我们计算在什么点上我们会受到通信瓶颈的限制。
我们所说的 Scaling 是指什么? (What Do We Mean By Scaling?)
“模型扩展 (model scaling)”的目标是能够增加用于训练或推理的芯片数量,同时实现吞吐量的成比例、线性增加(我们称之为 强扩展 (strong scaling))。虽然单个芯片上的性能取决于内存带宽和 FLOPs 之间的权衡,但集群层面的性能取决于通过与有用的 FLOPS 重叠来隐藏芯片间通信。这并非易事,因为增加芯片数量会增加通信负载,同时减少我们可以用来隐藏通信的每设备计算量。正如我们在 第 3 节 中看到的,分片矩阵乘法通常需要昂贵的 AllGathers 或 ReduceScatters,这可能会阻止 TPU 做有用的工作。本节的目标是找出这些操作何时变得 太昂贵。
在本节中,我们将讨论四种常见的并行方案:(纯) 数据并行 (data parallelism)、完全分片数据并行 (fully-sharded data parallelism) (FSDP / ZeRO 分片)、张量并行 (tensor parallelism) (也称为模型并行) 和 (简要) 流水线并行 (pipeline parallelism)。对于每一种,我们将展示我们产生什么通信成本,以及该成本在什么点上开始成为我们计算成本的瓶颈 1。
对于本节,你可以只关注芯片间通信成本,因为只要我们有足够大的单芯片批量大小,从 HBM 到 MXU 的数据传输就已经与计算重叠了。我们将使用以下符号来简化本节的计算:
| Notation | Meaning (model parameters) |
|---|---|
| D | dmodel (隐藏层维度/残差流维度) |
| F | dff (前馈层维度) |
| B | 批处理维度 (批次中的 token 总数,不是每设备的) |
| T | 序列长度 |
| L | 模型层数 |
| Notation | Meaning (hardware characteristic) |
|---|---|
| C | 每芯片 FLOPS/s |
| W | 网络带宽 (双向,通常带下标,例如 $W_{\text{ici}}$ 或 $W_{\text{dcn}}$ |
| X | 沿网格轴 X 的芯片数 |
| Y | 沿另一个网格轴 Y 的芯片数 |
| Z | 沿第三个网格轴 Z 的芯片数 |
为了简单起见,我们将 Transformer 近似为一堆 MLP 块——正如我们在 第 4 节 中看到的,对于较大的模型,注意力是 FLOPs 相对较小的一部分。如果不进行并行化,我们的简单 Transformer 层的算法如下:
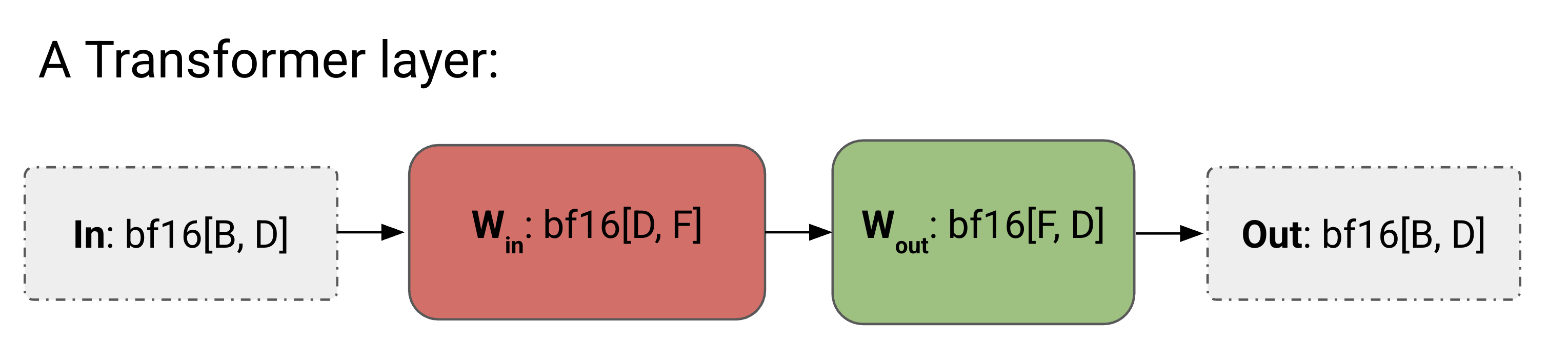
点击这里查看我们没有并行化的小 Transformer 的完整算法。
前向传播: 需要计算 Loss[B]
- Tmp[B, F] = In[B, D] *D Win[D, F]
- Out[B, D] = Tmp[B, F] *F Wout[F, D]
- Loss[B] = …
反向传播: 需要计算 dWout[F, D], dWin[D, F]
- dOut[B, D] = …
- dWout[F, D] = Tmp[B, F] *B dOut[B, D]
- dTmp[B, F] = dOut[B, D] *D Wout[F, D]
- dWin[D, F] = In[B, D] *B dTmp[B, F]
- dIn[B, D] = dTmp[B, F] *F Win[D, F] (前一层需要)
我们提供这个是为了与添加通信的算法进行比较。
以下我们将讨论 4 种并行方案。每个方案都可以看作是上图中 In, Win, Wout, 和 Out 的分片的唯一定义。
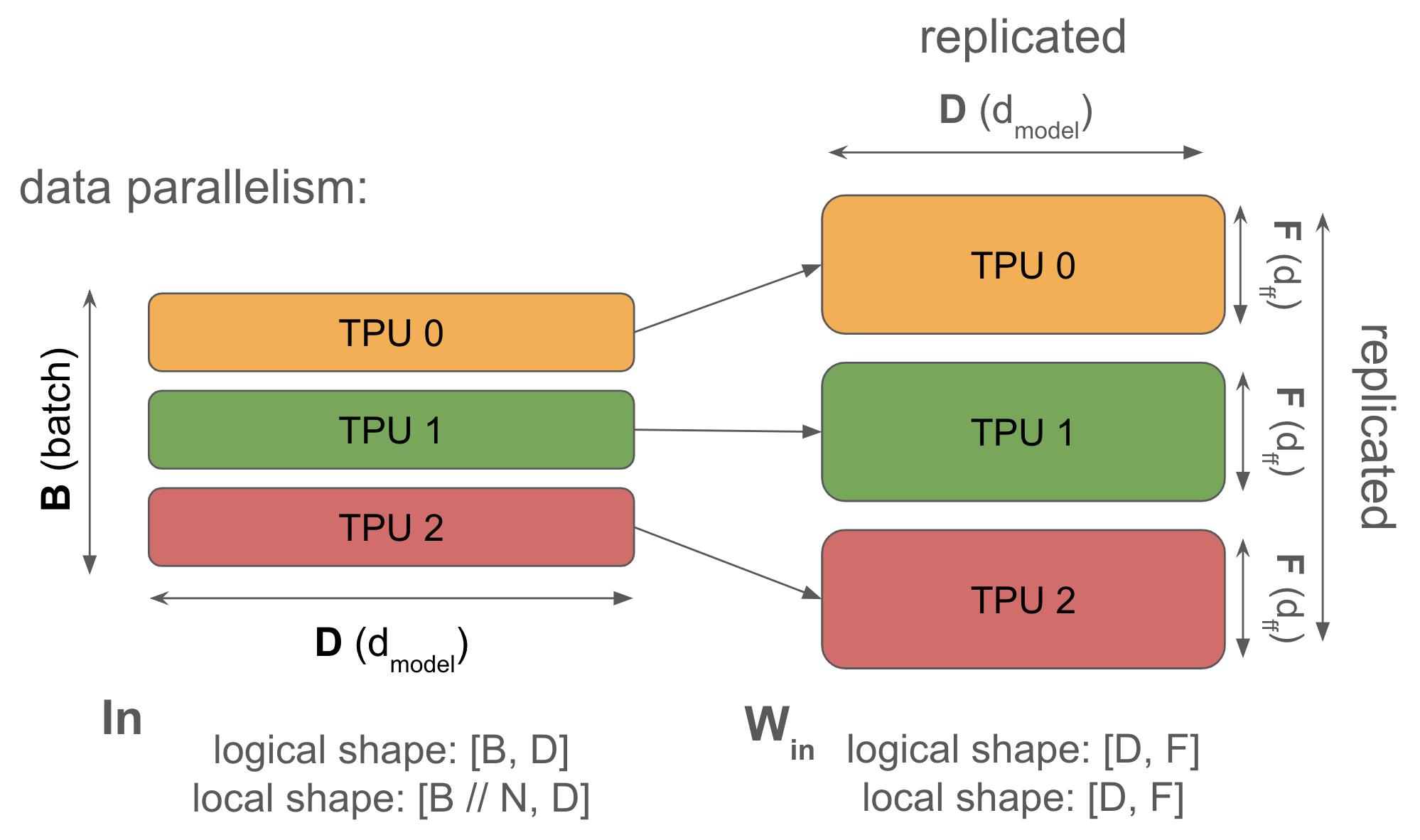
1. Data parallelism: 激活沿 batch 分片,参数和优化器状态在每个设备上复制。通信仅在反向传递期间发生。
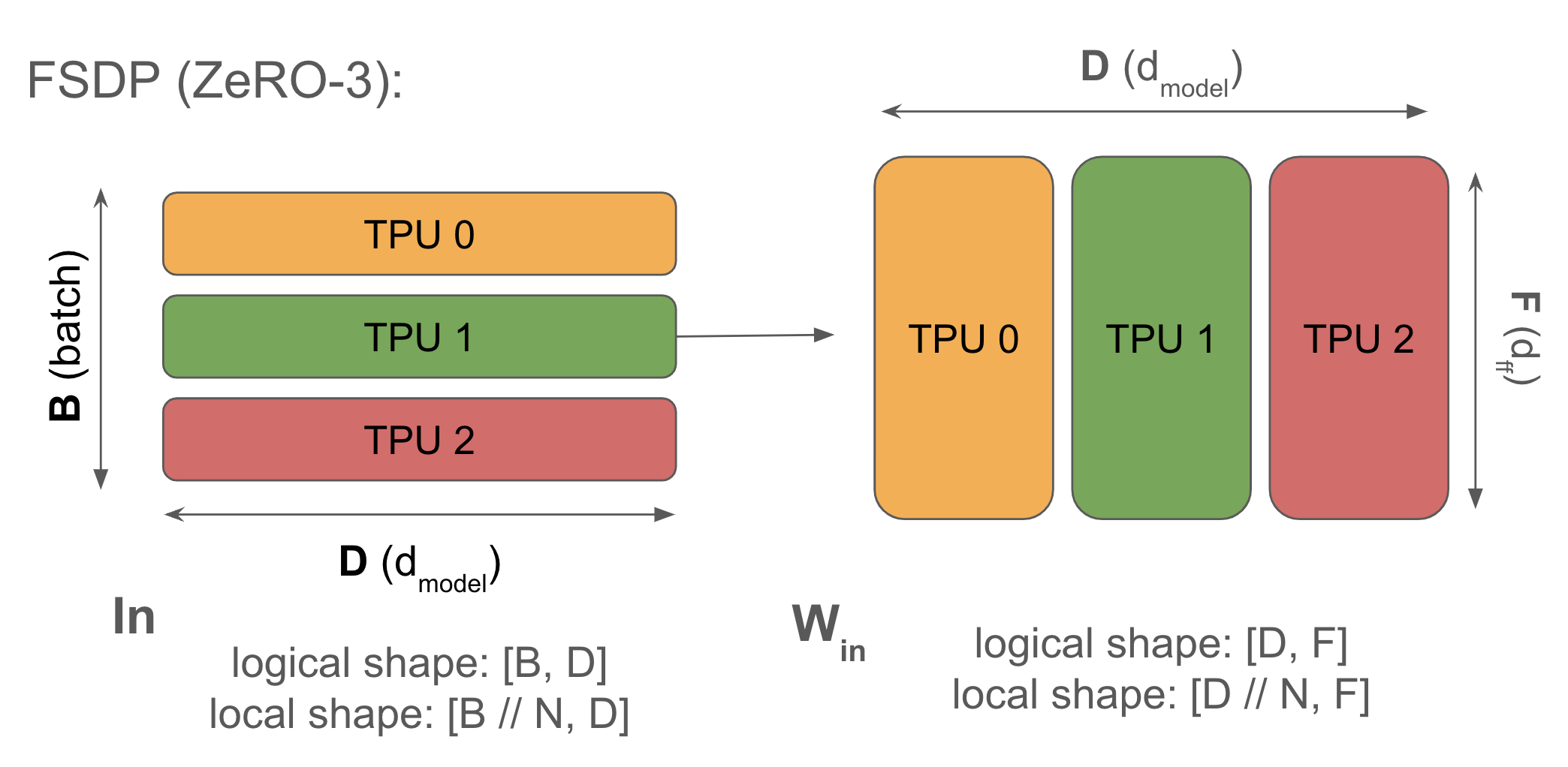
\[\text{In}[B_X, D] \cdot_D W_\text{in}[D, F] \cdot_F W_\text{out}[F, D] \rightarrow \text{Out}[B_X, D]\]2. Fully-sharded data parallelism (FSDP or ZeRO-3): 激活沿 batch 分片(像纯数据并行一样),参数沿相同网格轴分片,并在前向传递中使用前及时 AllGather。优化器状态也沿 batch 分片。减少重复内存。
\[\text{In}[B_X, D] \cdot_D W_\text{in}[D_X, F] \cdot_F W_\text{out}[F, D_X] \rightarrow \text{Out}[B_X, D]\]3. Tensor parallelism (also called Megatron sharding or model parallelism): 激活沿 D ($d_\text{model}$) 分片,参数沿 F ($d_{ff}$) 分片。在每块前后 AllGather 和 ReduceScatter 激活。与 FSDP 兼容。
\[\text{In}[B, D_Y] \cdot_D W_\text{in}[D, F_Y] \cdot_F W_\text{out}[F_Y, D] \rightarrow \text{Out}[B, D_Y]\]4. Pipeline parallelism: 权重沿层维度分片,激活微批处理并沿层维度滚动。流水线阶段之间的通信极小(只是在单跳上传输激活)。滥用符号:
\[\text{In}[L_Z, B, D][i] \cdot_D W_\text{in}[L_Z, D, F][i] \cdot_F W_\text{out}[L_Z, F, D][i] \rightarrow \text{Out}[L_Z, B, D][i]\]数据并行 (Data Parallelism)
Syntax: \(\text{In}[B_X, D] \cdot_D W_\text{in}[D, F] \cdot_F W_\text{out}[F, D] \rightarrow \text{Out}[B_X, D]\)
当你的模型可以在单个芯片上容纳即使是很小的 batch size(>240 tokens,以便计算受限)时,你应该始终使用简单的数据并行。 纯数据并行将我们的激活拆分到任意数量的 TPU 上,只要 TPU 的数量小于我们的 batch size。前向传递不涉及通信,但在每一步结束时,每个 TPU 对其本地梯度执行 AllReduce 以在更新参数之前同步它们。
点击这里查看前向和反向传递的完整算法。
纯数据并行算法:
前向传播: 需要计算 Loss[BX]
- Tmp[BX, F] = In[BX, D] *D Win[D, F]
- Out[BX, D] = Tmp[BX, F] *F Wout[F, D]
- Loss[BX] = …
反向传播: 需要计算 dWout[F, D], dWin[D, F]
- dOut[BX, D] = …
- dWout[F, D] {UX} = Tmp[BX, F] *B dOut[BX, D]
- dWout[F, D] = AllReduce(dWout[F, D] {UX}) (不在关键路径上,可以异步完成)
- dTmp[BX, F] = dOut[BX, D] *D Wout[F, D]
- dWin[D, F] {UX} = In[BX, D] *B dTmp[BX, F]
- dWin[D, F] = AllReduce(dWin[D, F] {UX}) (不在关键路径上,可以异步完成)
- dIn[BX, D] = dTmp[BX, F] *F Win[D, F] (前一层需要)
注意前向传递没有通信——全部在反向传递中!反向传递还有一个很好的属性,即 AllReduces 不在“关键路径”中,这意味着每个 AllReduce 可以在方便的时候执行,并且不会阻止你执行后续操作。如果总通信成本超过我们的总计算成本,它 仍然会成为瓶颈,但从实现的角度来看,它更加宽容。我们将看到模型/张量并行不具备此属性。
为什么要这样做? 纯数据并行通过在 batch 维度上拆分我们的激活来减少激活内存压力,允许我们只要有更多芯片来拆分 batch 维度就可以几乎任意增加 batch size。特别是在训练期间,当我们的激活通常主导我们的内存使用时,这非常有帮助。
为什么不这样做? 纯数据并行对于减少模型参数或优化器状态的内存压力毫无作用,这意味着纯数据并行对于参数 + 优化器状态无法放入单个 TPU 的大规模有趣模型很少有用。
我们何时受到通信瓶颈的限制?
我们成为计算受限的条件是 \(T_\text{math}/T_\text{comms} > 1\),或者当
\[\begin{align} \frac{B}{X} > \frac{C}{W_\text{ici}}. \end{align}\]结论是,为了在数据并行中保持计算受限,我们需要每设备 batch size \(B / X\) 超过 ICI 运算强度,$C / W_\text{ici}$。
完全分片数据并行 (Fully-Sharded Data Parallelism, FSDP)
Syntax: \(\text{In}[B_X, D] \cdot_D W_\text{in}[D_X, F] \cdot_F W_\text{out}[F, D_X] \rightarrow \text{Out}[B_X, D]\)
完全分片数据并行(通常称为 FSDP 或 ZeRO 分片)将模型优化器状态和权重拆分到数据并行分片上,并在需要时有效地 gather 和 scatter 它们。与纯数据并行相比,FSDP 极大地减少了每设备内存使用量,并节省了反向传递 FLOPs,开销极小。
点击这里查看 FSDP 的完整算法。
Fully-Sharded Data Parallelism (FSDP):
前向传播: 需要计算 Loss[BX]
- Win[D, F] = AllGather(Win[DX, F]) (不在关键路径上,可以在上一层期间做)
- Tmp[BX, F] = In[BX, D] *D Win[D, F] (现在可以丢弃 Win[D, F])
- Wout[F, D] = AllGather(Wout[F, DX]) (不在关键路径上,可以在上一层期间做)
- Out[BX, D] = Tmp[BX, F] *F Wout[F, D]
- Loss[BX] = …
反向传播: 需要计算 dWout[F, DX], dWin[DX, F]
- dOut[BX, D] = …
- dWout[F, D] {UX} = Tmp[BX, F] *B dOut[BX, D]
- dWout[F, DX] = ReduceScatter(dWout[F, D] {UX}) (不在关键路径上,可以异步完成)
- Wout[F, D] = AllGather(Wout[F, DX]) (可以提前完成)
- dTmp[BX, F] = dOut[BX, D] *D Wout[F, D] (在此处可以丢弃 Wout[F, D])
- dWin[D,F] {UX} = dTmp[BX, F] *B In[BX, D]
- dWin[DX, F] = ReduceScatter(dWin[D, F] {UX}) (不在关键路径上,可以异步完成)
- Win[D, F] = AllGather(Win[DX, F]) (可以提前完成)
- dIn[BX, D] = dTmp[BX, F] *F Win[D, F] (前一层需要) (在此处可以丢弃 Win[D, F])
我们何时受到通信瓶颈的限制?
\[T \approx 4 \cdot D \cdot F \cdot \max\left(\frac{B}{X \cdot C}, \frac{1}{W_\text{ici}}\right)\]因此,与纯数据并行一样,当 \(B / X > C / W_\text{ici}\) 时,我们是计算受限的。
Takeaway: 当每设备 batch size 小于 $2550 / M_X$ 时,FSDP 和纯数据并行都会受到带宽限制,其中 $M_X$ 是网格轴的数量。
张量并行 (Tensor Parallelism)
Syntax: \(\text{In}[B, D_Y] \cdot_D W_\text{in}[D, F_Y] \cdot_F W_\text{out}[F_Y, D] \rightarrow \text{Out}[B, D_Y]\) (we use \(Y\) to eventually combine with FSDP)
在完全分片数据并行 AllReduce 中,我们在芯片间移动权重。我们也可以分片模型的前馈维度并在层期间移动激活——这被称为“1D 模型并行”或 Megatron 分片。这可以解锁每 pod 更小的有效 batch size。
点击这里查看张量并行的算法!
Tensor Parallelism:
前向传播: 需要计算 Loss[B]
- In[B, D] = AllGather(In[B, DY]) (在关键路径上)
- Tmp[B, FY] = In[B, D] *D Win[D, FY] (沿收缩未分片,所以无通信)
- Out[B, D] {UY} = Tmp[B, FY] *F Wout[FY, D]
- Out[B, DY] = ReduceScatter(Out[B, D] {UY}) (在关键路径上)
- Loss[B] = …
反向传播: 需要计算 dWout[FY, D], dWin[D, FY]
- dOut[B, DY] = …
- dOut[B, D] = AllGather(dOut[B, DY]) (在关键路径上)
- dWout[FY, D] = Tmp[B, FY] *B dOut[B, D]
- dTmp[B, FY] = dOut[B, D] *D Wout[FY, D] (在此处可以丢弃 dOut[B, D])
- In[B, D] = AllGather(In[B, DY]) (这可以通过与前向传递中的 (1) 共享来跳过)
- dWin[D, FY] = dTmp[B, FY] *B In[B, D]
- dIn[B, D] {U.Y} = dTmp[B, FY] *F Win[D, FY] (前一层需要)
- dIn[B, DY] = ReduceScatter(dIn[B, D] {U.Y}) (在关键路径上)
这有多昂贵?
\[\frac{F}{Y \cdot C} > \frac{1}{W_\text{ici}}\]因此,例如,对于 TPUv5p,$C / W_{ici} = 2550$ (bf16),所以我们只能做张量并行直到 $Y < F / 2550$。当我们有多个 ICI 轴时,我们的 $T_\text{comms}$ 减少了 $M_Y$ 倍,所以我们得到 $Y < M_Y \cdot F / 2550$。
Takeaway: 当 $Y > M_Y \cdot F / 2550$ 时,张量并行变得受通信限制。对于大多数模型,这是 8 到 16 路张量并行。
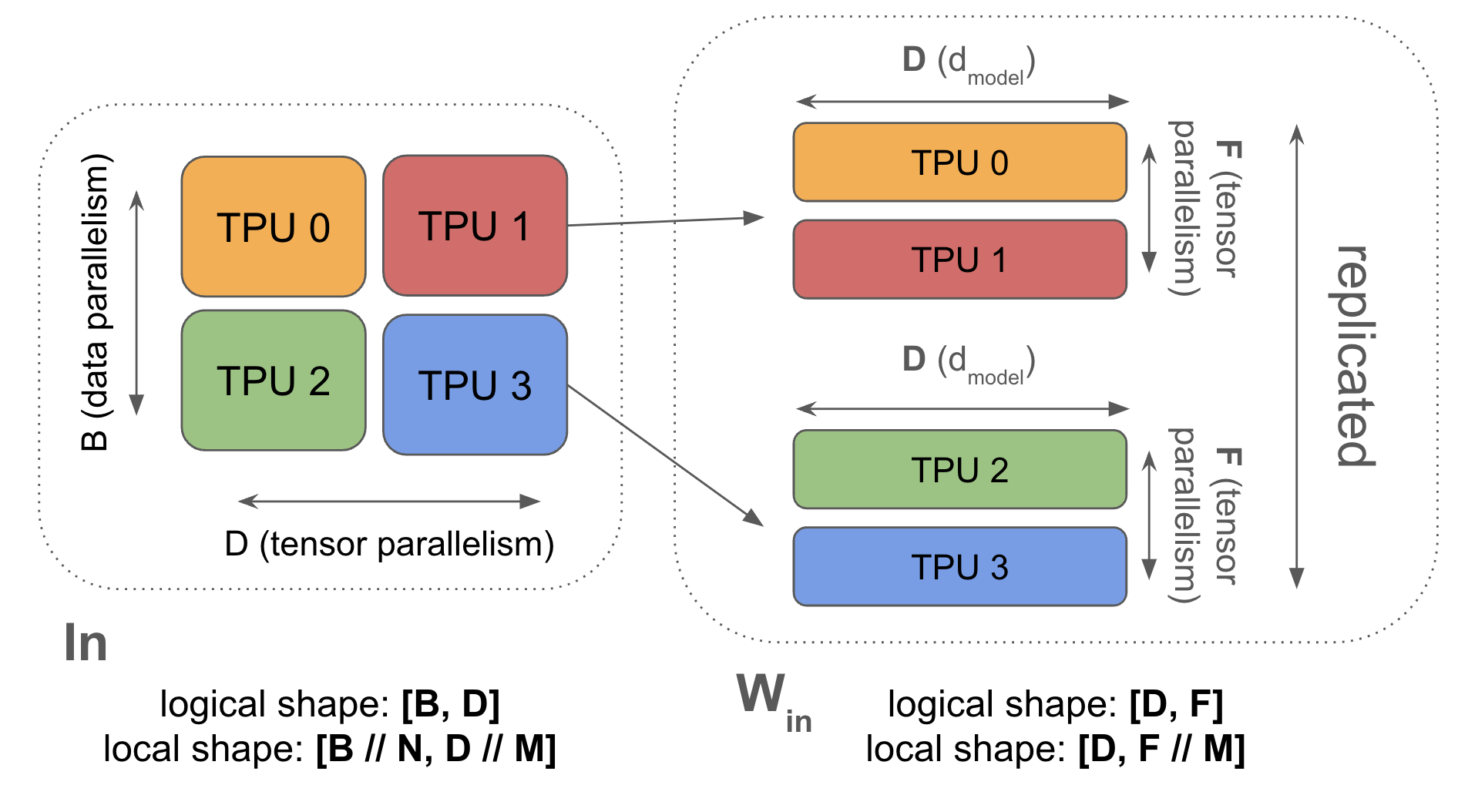
结合 FSDP 和张量并行 (Combining FSDP and Tensor Parallelism)
Syntax: \(\text{In}[B_X, D_Y] \cdot_D W_\text{in}[D_X, F_Y] \cdot_F W_\text{out}[F_Y, D_X] \rightarrow \text{Out}[B_X, D_Y]\)
FSDP 和张量并行很好的一点是它们可以结合使用。通过沿两个轴分片 Win 和 Wout,我们既节省了内存又节省了计算。

点击这里查看混合 FSDP + 张量并行的完整算法。
前向传播: 需要计算 Loss[B]
- In[BX, D] = AllGatherY(In[BX, DY]) (在关键路径上)
- Win[D, FY] = AllGatherX(Win[DX, FY]) (可以提前完成)
- Tmp[BX, FY] = In[BX, D] *D Win[D, FY]
- Wout[FY, D] = AllGatherX(Wout[FY, DX]) (可以提前完成)
- Out[BX, D] {U.Y} = Tmp[BX, FY] *F Wout[FY, D]
- Out[BX, DY] = ReduceScatterY(Out[BX, D] {U.Y}) (在关键路径上)
- Loss[BX] = …
(反向传播类似,为了简洁省略)
什么是 FSDP 和 TP 的正确组合? 简单的准则是 FSDP 移动权重,张量并行移动激活。这意味着随着我们的 batch size 缩小(尤其是当我们做更多数据并行时),张量并行变得更便宜,因为我们的每分片激活更小。
Takeaway: 一般来说,在训练期间,FSDP 的最佳数量是 \(X_{opt} = \sqrt{\frac{B}{F} \frac{M_X}{M_Y} N}\)。
Takeaway: 结合张量并行和 FSDP 允许我们将 $B/N$ 降低到 \(2550^2 / 2F\)。这让我们处理每芯片低至 100 的 batch,这大约比仅仅使用 FSDP 可以实现的要小八倍。
下面是一个交互式动画,展示了不同 batch size 下的总计算时间和通信时间:
注意:这里嵌入了原书的 plot,本地可能无法直接交互,由于跨域限制。
流水线 (Pipelining)
你可能已经注意到我们在前面的章节中完全避免谈论流水线。流水线是 GPU 并行的主导策略,但在 TPU 上稍微不那么重要。简而言之,流水线训练包括将模型的层拆分到多个设备上,并在前向和反向传递期间在流水线阶段之间传递激活。
为什么这是个好主意? 流水线之所以好是因为流水线阶段之间的通信成本低,这意味着即使使用低带宽互连也可以训练非常大的模型。这在 GPU 上通常非常有用。
为什么这很难/烦人? TPU 0 几乎总是空闲的!这被称为流水线气泡。通常我们通过微批处理来缓解这个问题。
跨 Pod 扩展 (Scaling Across Pods)
最大的 TPU 切片是 TPU v5p SuperPod,有 8960 个芯片。当我们想要扩展超过这个大小时,我们需要跨越数据中心网络 (DCN) 边界。
Takeaway: 只要我们的每 pod batch size 至少为 71k tokens,使用纯数据并行跨多个 TPU pod 扩展就相当简单。
TPU 上 LLM 训练的要点 (Takeaways from LLM Training on TPUs)
- 增加并行度或减小 batch size 都倾向于使我们更加受通信限制,因为它们减少了每芯片执行的计算量。
- 在训练期间,我们要考虑 4 种主要的并行方案(数据并行、FSDP、张量并行)。
| Strategy | Description |
|---|---|
| Data Parallelism | 激活是 batch 分片的,其他所有都是完全复制的,我们在反向传递期间 all-reduce 梯度。 |
| FSDP | 激活、权重和优化器是 batch 分片的,权重在使用前被 gathered,梯度被 reduce-scattered。 |
| Tensor Parallelism (aka Megatron, Model) | 激活沿 \(d_\text{model}\) 分片,权重沿 \(d_{ff}\) 分片,激活在 Win 之前 gathered,结果在 Wout 之后 reduce-scattered。 |
| Mixed FSDP + Tensor Parallelism | 上述两者的结合,其中 FSDP gather 模型分片权重。 |
- 纯数据并行很少有用,因为模型及其优化器状态使用字节 = 10x 参数计数。
- 数据并行和 FSDP 在 \(\text{batch size per shard} < C / W\) 时变得受通信限制。
- 张量并行在 \(\lvert Y\rvert > F / 2550\) 时变得受通信限制。对于大多数模型,这是大约 8-16 路。
- 混合 FSDP + 张量并行允许我们将 batch size 降低到 \(2550^2 / 2F \approx 100\)。
一些练习题 (Some Problems to Work)
让我们使用 LLaMA-2 13B 作为本节的基础模型。
Question 1: LLaMA-2 13B 有多少参数?
点击这里查看答案。
- FFW 参数: \(3LDF\) =
8.5e9 - Attention 参数: \(4DNHL\) =
4.2e9 - Vocabulary 参数: \(2VD\) =
0.3e9 - Total:
8.5e9 + 4.2e9 + 0.39e9 = 13.1e9,不出所料!
Question 2: 假设我们使用 BS=16M tokens 和 Adam 进行训练。忽略并行性,模型的参数、优化器状态和激活总共使用多少内存?
点击这里查看答案。
参数 (bf16) 和两个优化器状态 (fp32) 的总内存为 (2 + 4 + 4) * 13e9 ~ 130GB。前两个 matmuls 后的激活形状为 $BF$,最后一个为 $BD$,所以 bf16 的总内存为 2 * 40 * 16e6 * 5,120 * (1 + 2 * 2.7) ~ 4.2e13 = 42TB。
Question 3: 假设我们想在 TPUv5p 16x16x16 切片上以 32k 序列长度和 3M tokens 的总 batch size 进行训练。假设如上所述使用 bfloat16 权重和 float32 优化器。
- 我们可以使用纯数据并行吗?
- 我们可以使用纯 FSDP 吗?
- 我们可以使用混合 FSDP + 张量并行吗?如果可以,$X$ 和 $Y$ 应该是什么?
点击这里查看答案。
-
我们不能使用纯数据并行,因为它在每个芯片上复制参数和优化器状态,这已经大约 130GB,超过了我们每芯片的 HBM (96GB)。
-
让我们从内存方面看。使用 3M 而不是 16M,我们得到
~7.86e12总检查点激活,加上 1.3e11 优化器状态,这使我们几乎正好达到 8TB。TPUv5p 切片总共有393TBHBM,所以我们在 HBM 限制内。接下来看我们是否受通信限制。使用 4096 个芯片和 3 个并行轴,我们可以做的最小 batch size 是850 * 4096 = 3.48Mtokens。这略高于我们的 3M batch size。所以我们实际上是受通信限制的。所以一般答案是 不,我们不能单独做 FSDP。 -
现在我们知道主要问题是受通信限制,所以让我们代入一些数字。首先,我们知道混合 FSDP + 张量并行的每芯片 batch size 需要高于 $2550^2 / 2F = 235$。这意味着我们理论上可以做到! 我们有规则 $X_{opt} = \sqrt((F / B) * (M_X / M_Y) * N)$,所以这里即使是
sqrt(3e6 * 2 * 4096 / 13824) = 1333,意味着我们将做大约 1024 路 DP 和 4 路 TP。
Appendix A: Deriving the backward pass comms
上面,我们将 Transformer 层前向传递简化为 Out[B, D] = In[B, D] *D Win[D, F] *F Wout[F, D]。我们如何推导反向传递所需的通信?
点击这里查看推导。
- dWout[F, D] = Tmp[B, F] *B dOut[B, D]
- dTmp[B, F] = dOut[B, D] *D Wout[F, D]
- dWin = dTmp[B, F] *B Tmp[B, F]
- dIn[B, D] = dTmp[B, F] *F Win[D, F]
注意这些公式是数学陈述,没有提到分片。反向传递的工作是计算这四个量。所以要弄清楚所需的通信,我们只需采用上述四个方程中要进行 matmul 的所有量(Tmp, dOut, Wout, Win)的分片,这些分片由我们的并行化方案指定,并使用分片 matmuls 的规则来弄清楚我们需要做什么通信。
脚注
来源
-
我们将专注于通信边界。 ↩︎
